как делаются роботы?
на моём любимом робофоруме есть интересный пост — Алюминиевый Hexapod

примечательна история создания данного красавца:
А началось все с ролика на ziza. Там я увидел впервые похожее чудо. И мне просто до жути захотелось что то подобное. Роботами я давно болел, но сделать что то такое не было ни возможности, ни знаний, ни смелости. А после увиденного я просто загорелся, причем ярким пламенем
Но строить точь точь такого же я не стал. Зачем? Можно же ведь поимпровизировать, что-то улучшить, что-то упростить. С чего начать не знал, потому и начал с макета.
В последствии макет вылился в другой более правдоподобный макет и понеслась. Сколько я потратил денег неизвестно никому, попросту потому что понятия ничего не имел ни о механике, ни о электронике. Потихоньку, когда все начало устаканиваться и начали приходить заказанные детали все начало вставать на места. А когда все начало вставать на места полезли ошибки. В принципе я хотел остановится на пластиковой версии хоть она и весила 2,5 кг без аккумулятора . Но крепление серво к деталям мне не нравилось, да и народ на форумах сказал что не очень надежно и я снова сел за автокад. Сколько я народу напугал своим пластиковым вариантом
на фотографии выше представлена четвёртая версия робота.
Фабрично выглядит потому что это четвертый вариант
. Первый и последующие были не такие классные. Сначала клеил из бумаги потом лепил из фанеры, а третьего пилил из пластика в ручную ножевкой по металлу. Все это шло довольно долго, около года, прорабатывалась каждая деталь. Я столько пластика перепортил :O Извел кучу времени вычерчивая все в акаде. Ну а эту версию я просто вырезал на координатном станке, потому и выглядит так.
авторские фотографии становления робота:



фото ноги крупным планом:
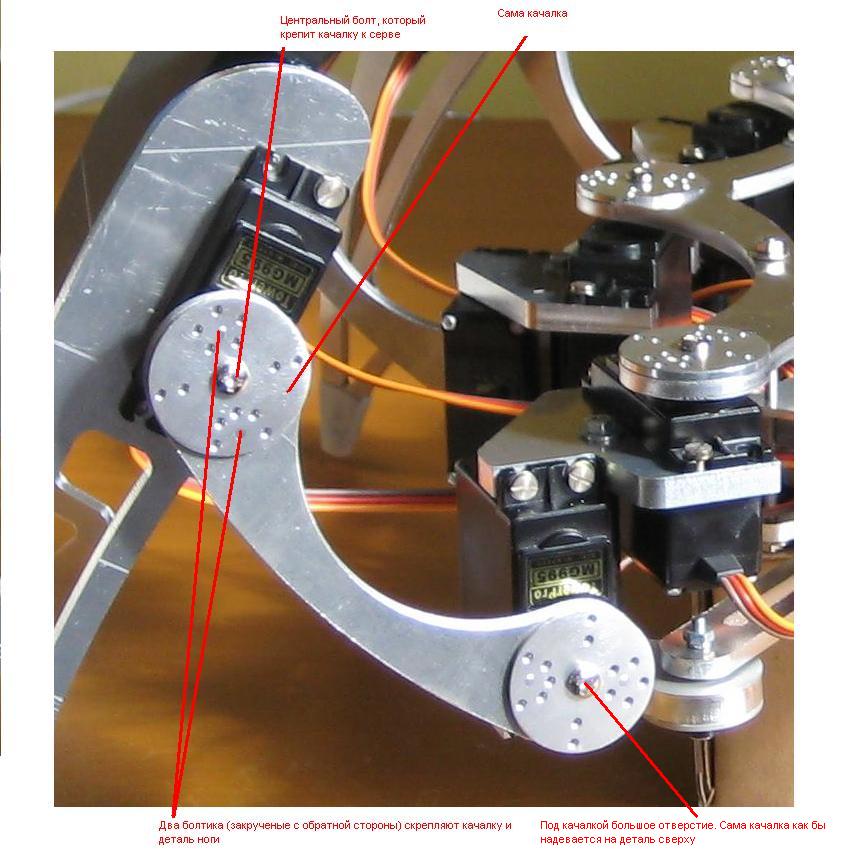
как видно — получается по три сервы на ногу.
В противоположность роботу-горшку у которого всего четыре ноги и, похоже, всего по два сервомотора на каждую ногу.
Свежие комментарии